近日,中國科大工程科學(xué)學(xué)院、人形機器人研究院孫帥帥特任教授課題組聯(lián)合澳大利亞伍倫貢大學(xué)李衛(wèi)華教授�����、中國科大贠國霖特任教授和張世武教授���,成功研發(fā)了一種基于磁流變技術(shù)的手部外骨骼系統(tǒng)����,能夠極大增強手部抓握耐力與抓握力���,有望服務(wù)于地震救援����、工業(yè)生產(chǎn)等應(yīng)用場景�。相關(guān)成果以“Non-motorized Hand Exoskeleton for Rescue and Beyond: Substantially Elevating Grip Endurance and Strength”為題在線發(fā)表于機器人領(lǐng)域著名國際期刊《IEEE Transactions on Robotics》。
人手的抓握功能對于人類發(fā)展至關(guān)重要。然而����,受限于人手和手臂肌肉的大小�,人手在承受較大重量時很快疲勞,影響地震�����、火災(zāi)救援等工作的開展��?����?纱┐鞯氖植客夤趋罊C器人能夠利用機械結(jié)構(gòu)及致動器共同作用給予人手助力����,從而增強人手功能表現(xiàn),是當(dāng)前機器人領(lǐng)域的研究熱點之一�。然而����,現(xiàn)有的外骨骼研究中使用的電機、液壓、氣動等致動器普遍存在著輸出力小���、體積大和重量大等問題,難以解決大幅增強手部抓握耐力和抓握力的難題。
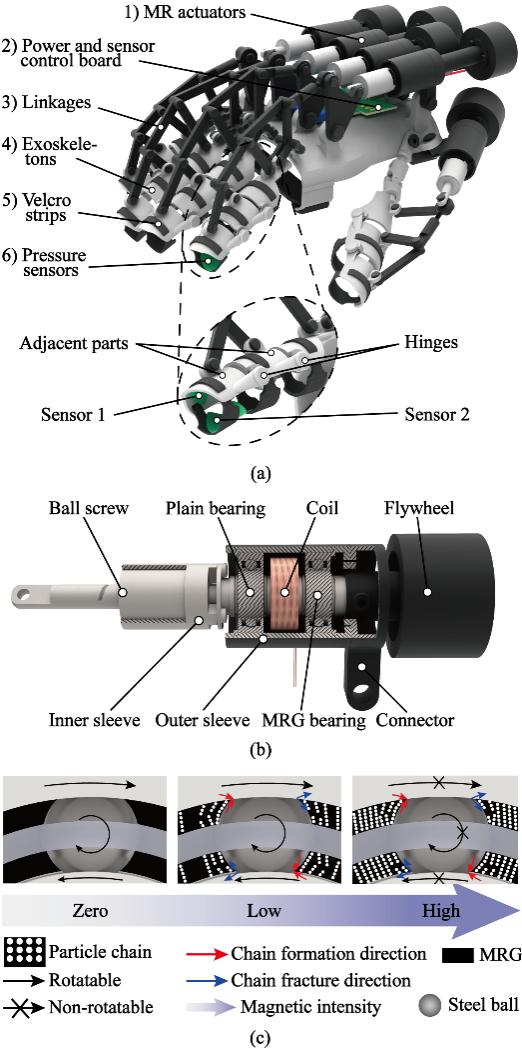
研究團隊利用磁流變智能材料模量可調(diào)的特性,創(chuàng)新地設(shè)計了基于磁流變軸承和滾珠絲桿結(jié)構(gòu)的被動致動器,在僅需5瓦功耗下實現(xiàn)了最高1046牛的大輸出力,力-功率比相較其他方案提升一個數(shù)量級����,在同樣輸出力下節(jié)省了97.7%的能量消耗���。將其應(yīng)用到手部外骨骼上時��,整手可提供788N的最大助力����。同時,磁流變致動器在結(jié)合飛輪后,人手穿戴外骨骼可以在無需外部能量輸入情況下提升41.8%的瞬時抓握力����。
圖1.手部外骨骼與磁流變致動器結(jié)構(gòu)�����,以及磁流變軸承工作原理
研究團隊對磁流變手部外骨骼進(jìn)行了地震救援模擬應(yīng)用實驗�����。在營救被壓人員和運送傷員的任務(wù)中���,受試者指屈肌的肌電信號幅度均大幅減小���,意味著控制手指抓握的肌肉活動度大幅降低��。在運送傷員任務(wù)中,受試者呼吸率相較無外骨骼情況平均降低了20%�����,最大運送距離提升了110%。實驗表明���,團隊研發(fā)的磁流變手部外骨骼可大幅提升人手抓握耐力、降低重體力勞動中的運動代謝�����、提高救援工作任務(wù)效率����,該項工作有望應(yīng)用于地震、火災(zāi)救援與工業(yè)生產(chǎn)領(lǐng)域���。
圖2.磁流變手部外骨骼在地震救援中的應(yīng)用實驗
工程科學(xué)學(xué)院精密機械與精密儀器系博士生麥賢龍為第一作者���,該系孫帥帥特任教授����、澳大利亞伍倫貢大學(xué)李衛(wèi)華教授以及近代力學(xué)系贠國霖特任教授為論文共同通訊作者�����。論文的合作者還包括中國科大工程科學(xué)學(xué)院張世武教授��、龔興龍教授,西安電子科技大學(xué)機電工程學(xué)院訾斌教授���、安徽大學(xué)楊健教授以及中國科大在讀博士生黎雷等。該項研究工作得到了國家自然科學(xué)基金���、中國科大科研啟動資金�����、中央高校基本科研業(yè)務(wù)資金�、中國科大雛鷹基金以及英國皇家學(xué)會-牛頓國際獎學(xué)金的支持����?�!禝EEE Transactions on Robotics》(T-RO)為機器人學(xué)領(lǐng)域公認(rèn)的國際頂級期刊之一�,要求論文在理論及工程實踐上均能為機器人學(xué)發(fā)展做出重要貢獻(xiàn)����,其每年全球發(fā)文量約200篇,接收率極低�����,刊發(fā)的相關(guān)成果代表了機器人領(lǐng)域先進(jìn)的重大進(jìn)展��。